MMD扫盲系列02——MMD基本骨骼介绍
扫盲系列能开到第二期,在座各位都有责任,这期来讲讲骨骼。(全部是我的理解),同时这一期不咋讲参数之类的,写不动,下一期写。
基本介绍
这里拿一个全套骨骼来讲,一个人物模型要想能用,基本包括标准骨和次标准骨。
| 骨骼名1 | 骨骼名2 | 骨骼名3 | 骨骼名4 | 骨骼名5 |
|---|---|---|---|---|
| 操作中心 | 左腕 | 左薬指2 | 右手捩2 | 右人指2 |
| 全ての親 | 左腕捩 | 左薬指3 | 右手捩3 | 右人指3 |
| センター | 左腕捩1 | 左薬指先 | 右手首 | 右人指先 |
| グルーブ | 左腕捩2 | 左中指1 | 右ダミー | 腰キャンセル左 |
| 腰 | 左腕捩3 | 左中指2 | 右手先 | 左足 |
| 左足IK親 | 左ひじ | 左中指3 | 右親指0 | 左ひざ |
| 左足IK | 左手捩 | 左中指先 | 右親指1 | 左足首 |
| 左つま先IK | 左手捩1 | 左人指1 | 右親指2 | 左つま先 |
| 右足IK親 | 左手捩2 | 左人指2 | 右親指先 | 腰キャンセル右 |
| 右足IK | 左手捩3 | 左人指3 | 右小指1 | 右足 |
| 右つま先IK | 左手首 | 左人指先 | 右小指2 | 右ひざ |
| 上半身 | 左ダミー | 右肩P | 右小指3 | 右足首 |
| 上半身2 | 左手先 | 右肩 | 右小指先 | 右つま先 |
| 下半身 | 左親指0 | 右肩C | 右薬指1 | 左足D |
| 首 | 左親指1 | 右腕 | 右薬指2 | 左ひざD |
| 頭 | 左親指2 | 右腕捩 | 右薬指3 | 左足首D |
| 両目 | 左親指先 | 右腕捩1 | 右薬指先 | 左足先EX |
| 左目 | 左小指1 | 右腕捩2 | 右中指1 | 右足D |
| 右目 | 左小指2 | 右腕捩3 | 右中指2 | 右ひざD |
| 左肩P | 左小指3 | 右ひじ | 右中指3 | 右足首D |
| 左肩 | 左小指先 | 右手捩 | 右中指先 | 右足先EX |
| 左肩C | 左薬指1 | 右手捩1 | 右人指1 |
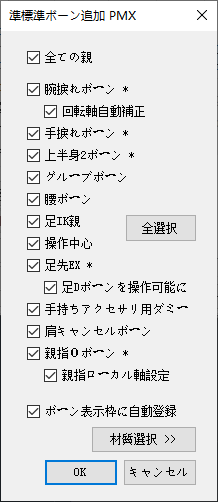
其中,下图这些是次标准骨。
其中模型的父子级关系(或称亲子关系)是尤为重要的,亲骨可以掌管子骨,比如上半身骨可以掌管整个上半身,而首作为上半身的子骨,可以对整个脖子和头做控制,诸如此类的。下面这张图之间的关系就是骨骼间的亲子关系。

详细介绍
我会分大类讲,左右都有的骨骼我会直接合起来讲。
操作中心
这个骨骼在很多模型中都有,但是没什么用,不参与模型的移动旋转等操作。
全ての親
这个骨骼是所有骨骼的父骨骼,所有骨骼都继承自它,他可以使整个模型移动,旋转。但是需要注意的是,全ての親和操作中心基本都处在X,Y,Z都是0,即(0,0,0)的位置,两个骨骼重合,有的萌新点到了操作中心就会误以为是全ての親,四处询问为什么移动不了。所以一定得看自己是点到了哪个骨骼。
センター与グルーブ
一般并称为重心骨,控制模型重心移动。在不同的动作中位置要求不一样,不过普遍是在两腿之间,低于左右足D,高于左右右ひざ。两者的亲子关系一般是センター为グルーブ亲骨
腰
这个骨骼是一个特殊的存在,一般来讲不分配权重,模型腰部的权重一般会分配在下半身和上半身上,但是上下半身的亲骨一般都在这个骨骼上。
上半身/上半身2
负责掌控上半身的旋转,位置上是上半身骨与下半身相重合,否则会有过度扭曲的情况,除非权重刷的很好。然后上半身2乃至上半身3456,都是对于上半身的进一步细分。
首
掌管脖子和头的旋转
頭
掌管整个头部
両目
同时掌管左右眼的旋转等
左/右目
单独掌控左右眼珠子
左/右肩
就是,,肩膀
右/左肩P
抖肩之类用,可以只动肩膀而手臂保持不变,需要肩c的配合
右/左肩C
抖肩之类用,付与亲为肩p,但是付与率是-1,用来协助在使用肩p耸肩后,手臂骨仍然保持原有的角度。
左/右腕
左右胳膊,大臂
左/右腕捩
这个骨骼控制手大臂绕臂旋转,需要设置local轴(一般插件生成的自己就带local轴了)。若遇到转向错误,可尝试手动调整子骨指向,并在view窗口中为骨骼手动分配local轴。另一种方法是将捩骨上的权重逐渐转移至相应的骨骼,随后删除捩骨,并使用插件重新添加。完成后,务必将权重类型转为SDEF以避免过度扭曲。若骨骼带有序号1/2/3,则表示其为捩骨的方向分解,比如指向XYZ分解。
左/右ひじ
控制小臂的
左/右手捩
是小臂的,具体效果与左/右腕捩大致相同
左/右手首
控制手掌的骨骼
左/右ダミー
左右手持骨,一般会把扇子,手杖之类的东西绑在这个骨骼上
左/右親指
大拇指,至于后面的0123都是指关节,数字越大,离手掌越远
左/右小指
小拇指,至于后面的0123都是指关节,数字越大,离手掌越远
左/右薬指
无名指,至于后面的0123都是指关节,数字越大,离手掌越远
左/右中指
中指,至于后面的0123都是指关节,数字越大,离手掌越远
左/右人指
食指,至于后面的0123都是指关节,数字越大,离手掌越远
下半身
控制整个下半身的骨骼,位置上是上半身骨与下半身相重合,否则会有过度扭曲的情况,除非权重刷的很好。
腰キャンセル左/右
用于保持脚部位置不变的时候调整膝盖膝盖朝向用
左/右足
大腿的骨骼
左/右ひざ
膝盖,小腿
左/右足首
脚掌
左/右つま先
脚尖
左/右足D
和左/右足大差不差,用于脱离足ik限制进行踹脚使用的骨,变形层级大于足和足IK
左/右ひざD
和左/右ひざD大差不差,用于脱离足ik限制进行踹脚使用的骨,变形层级大于足和足IK
左/右足首D
和左/右足首大差不差,用于脱离足ik限制进行踹脚使用的骨,变形层级大于足和足IK
左/右足先EX
对于前脚掌,x轴应精确对齐至脚掌所指向的骨骼(即骨骼看起来位于足首骨与脚尖骨连接的直线上)。使用次标准骨骼进行追加时,若存在ex骨,则不会追加d骨。因此,通常这个EX骨是通过插件自动追加,而非手动创建。然而,追加后的前脚掌权重可能出现问题,建议重新调整权重以确保准确性。
右/左足IK
影响腿部的骨骼结构包括足和ひざ,其位置定位于足首。在没有使用插件追加骨骼前,其亲骨骼是-1,而追加之后,则变为足IK親骨骼。其变形层级为1,这个层级比腿部的其他骨骼的变形层级要大。相关位置定位在足首骨上,其中target是足首骨,Loop是40,单位角114.5916。在整个IK链中,包含了足骨和膝骨。为了确保骨骼的运动趋势符合人体自然运动,IK骨需要指向本身骨骼的正后方,并需要给足骨加上角度限制,即-180和-0.5。
右/左つま先IK
影响脚掌的骨骼,包含足首,位置在脚尖,亲骨是足IK,变形层级为1(比腿部的骨骼变形层级大)。(亲骨是足IK,位置在脚尖骨上,target是脚尖,loop3,单位角229.1831,IK链中包含足首骨,IK骨需要指向本身骨骼的正下方)
关于IK
IK骨的loop 单位角 角度限制参数不固定,可以自己根据模型本身进行修改
右/左足IK親
一般在左/右足首骨下面,一个单纯的移动骨骼,亲骨是全亲骨,作为足IK的亲骨骼
~先
一般作为指向骨用,比如我的A骨骼为了方便,就可以设置一个A先作为定位指向。
- 标题: MMD扫盲系列02——MMD基本骨骼介绍
- 作者: 亓翎_Re-TikaRa
- 创建于 : 2024-07-23 22:53:37
- 更新于 : 2024-11-20 20:04:34
- 链接: https://re-tikara.fun/posts/7639a586/
- 版权声明: 本文章采用 CC BY-NC-SA 4.0 进行许可。
